Teoria de control. Control PID#
Pàgina en desenvolupament
Encara estem treballant en aquest document.
Esperem oferir-vos properament el seu contingut.
Disculpeu les molèsties.
Control tot o res#
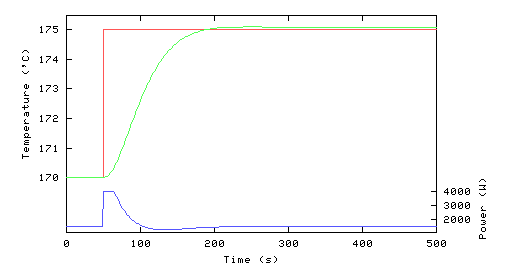
Si pensem en un sistema de control d’un forn convencional, per exemple controlat per un termostat amb bimetall o un relé controlat pe un sensor, el controlador posa en marxa el calefactor si la temperatura està per sota del valor de consigna, i l’atura quan és superior. El resultat estacionari oscil·la al voltant del valor de consigna:
| |
|
La gràfica anterior s’ha obtingut amb un simulador en línia. La línia vermella indica el valor de consigna, la blava l’estat del calefactor i la verda la temperatura aconseguida.
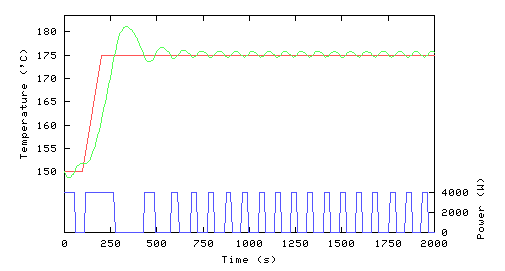
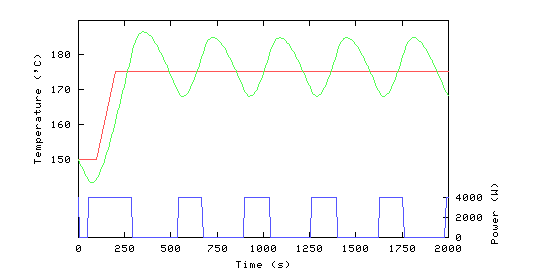
A més a més en aquest sistemes de control amb element mecànics (bimetall o relé) s’acostuma a permetre una banda de valors acceptables (histèresi) per minimitzar el desgast d’aquests elements a prop del valor de consigna. El resultat no és molt satisfactori:
| |
|
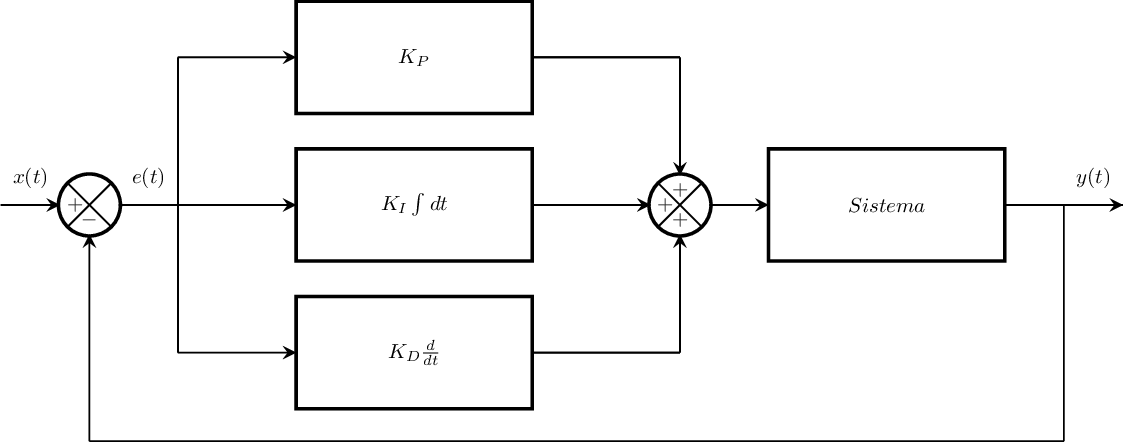
Control PID#
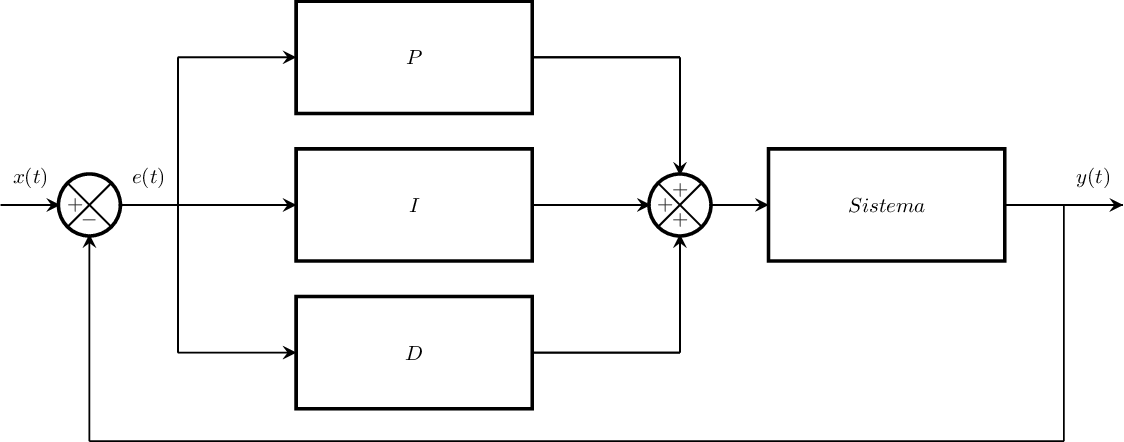
Un control PID té en compte tres contribucions:
Proporcional. Ens diu com de lluny és la consigna, i quant esforç és necessari per arribar-hi.
Integral. Ens diu l’error acumulat, es a dir, com d’efectiu és l’esforç aplicat.
Derivativa. Ens diu la velocitat de canvi, pot ser útil per predir com el sistema canviarà en el futur.
Amb un control PID podem evitar aquests problemes d’oscil·lació que hem vist al control tot o res. Veiem un exemple:
Show code cell source
from IPython.display import YouTubeVideo
YouTubeVideo('HRJiow_k-V0')
Ajust dels paràmetres del PID#
Cada un dels elements del controlador PID té un paràmetre que hem d’ajustar:
Com ajutem els valors de \(K_P\), \(K_I\) i \(K_D\)?
Existeixen diferents tècniques: Ziegler i Nichols, cancelació de pols, assignación de pols [Gir24], CDHW, John Shaw [Wil24], auto tuning i fins-i-tot ajust manual [Lla19].
Manual? Sí. Aquí teniu el resultat d’un ajust manual per al nostre forn: